
Electromagnetic perturbations of frequency lower than the ion cyclotron frequency are widely believed to be more important than high-frequency ones in transporting plasma in tokamaks. (This assumption can be verified numerically when we are able to do a full simulation including both low-frequency and high-frequency perturbations. This kind of verification is not possible at present due to computation costs.)
If we assume that only low-frequency perturbations are present, the Vlasov equation can be simplified. Specifically, symmetry of the particle distribution function in the phase space can be established if we choose suitable phase-space coordinates and split the distribution function in a proper way. The symmetry is along the so-called gyro-angle α in the guiding-center coordinates (X,μ,𝜀,α). In obtaining the equation for the gyro-angle independent part of the distribution function, we need to average the equation over the gyro-angle α and thus this model is called “gyrokinetic”.
In deriving the gyrokinetic equation, the perturbed electromagnetic field is assumed to be known and of low-frequency. To do a kinetic simulation, we need to solve the field equation to obtain the perturbed electromagnetic field. It is still possible that high frequency modes (e.g., compressional Alfven waves and ΩH modes) appear in a gyrokinetic simulation. If the amplitude of high frequency modes is large, then the simulation is invalid since the gyrokinetic model is invalid in this case.
Our starting point is the Vlasov equation in terms of particle coordinates (x,v):
|
| (1) |
where f = f(t,x,v) is the particle distribution function, x and v are the location and velocity of particles. The distribution function f depends on 6 phase-space variables (x,v), besides the time t.
Choose Cartesian coordinates (x,y,z) for the configuration space x. Consider a simple case where the
electromagnetic field is a time-independent field given by B = B0(x,y,z) and E = 0. Let us examine
the Vlasov equation in this case and look whether there is any coordinate system that can simplify the
Vlasov equation.
and E = 0. Let us examine
the Vlasov equation in this case and look whether there is any coordinate system that can simplify the
Vlasov equation.
Describe the velocity space using a right-handed cylindrical coordinates (v⊥,α,v∥), where v∥ = v ⋅ e∥, e∥ = ez is the unit vector along the magnetic field, α is the azimuthal angle of the perpendicular velocity (v⊥ = v −v∥ez) relative to ex. Note that these coordinates are defined relative to the local magnetic field, which may vary in space.
Next, let us express the spatial gradient of f in terms of partial derivatives:
Note that this gradient is taking by holding v constant (i.e., (vx,vy,vz) constant rather than (v⊥,α,v∥) constant). So, we need do the following coordinate transform:
 | (3) |
Using chain rule, expression (2) is written as

 | (6) |
are generally nonzero since the defintion of (v⊥,α,v∥) depends on the local magnetic field direction. In our simple case, they are zero since the magnetic field direction is uniform. Similarly, we obtain
 | (7) |
 | (8) |
Then, in (x′,y′,z′,v⊥,α,v∥) coordinates, the spatial gradient of f is written as
 | (9) |
Next, consider the gradient in velocity space
where e1 = v⊥∕|v⊥|, v⊥ = v − (v ⋅ez)ez, and eα = ez ×e1. Using Eq. (10), (v ×B) ⋅
(v ×B) ⋅ is written as
is written as
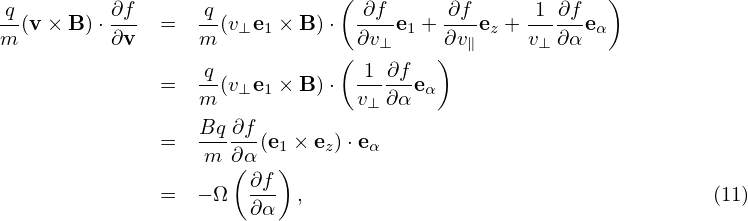
 | (12) |
i.e.,
 | (13) |
Define the following coordinates transform (guiding-center transform):
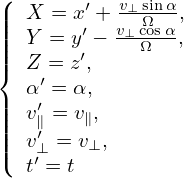 | (14) |
Next, we express the partial derivatives of f appearing in Eq. (13) in terms of the guiding-center coordinates. Using the chain rule, we obtain
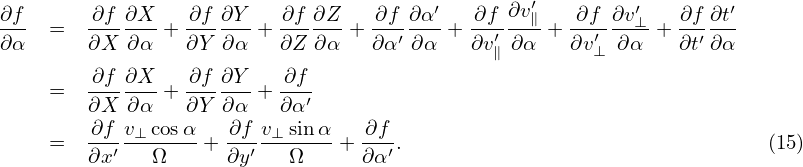
 | (16) |
and

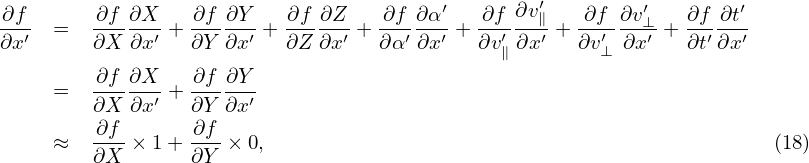
 | (19) |
Using the above results, equation (13) in the guiding-center coordinates is written as
 | (20) |
Here we find some terms cancel each other, giving
 | (21) |
Equation (21) is the equation for f in the guiding-center coordinates (X,Y,Z,v⊥′,α′,v∥′).
Define gyro-phase averaging operator
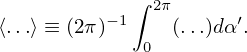 | (22) |
Then averaging Eq. (21) over α′, we get
 | (23) |
As is assumed above, Ω is approximately independent of α′ and thus Ω in Eq. (23) can be moved outside of the gyro-angle integration, giving
 | (24) |
Peforming the integration, we get
![∂⟨f⟩ ′∂⟨f⟩ − 1 ′ ′
∂t′ + v∥ ∂Z − Ω (2π ) [f(α = 2π)− f(α = 0)] = 0.](nonlinear_gyrokinetic_equation28x.png) | (25) |
Since α′ = 2π and α′ = 0 correspond to the same phase space location, the corresponding values of the distribution function must be equal. Then the above equation reduces to
 | (26) |
which is an equation for the gyro-angle independent part of the distribution function.
Next let us investigate whether the guiding-center transform can be made use of to simplify the kinetic equation for more general cases where we have a (weakly) non-uniform static magnetic field, plus electromagnetic perturbations of low frequency (and of small amplitude and k∥ρi ≪ 1). And we will include the effect that B0 depends on α′, i.e., grad-B and curvature drift.

